







Read the Full Series
This article is one part of a walkthrough detailing how we recreated an NXP i.MX 8M Mini–based computer using Quilter’s physics-driven layout automation.
For our first board, we built an Arduino Uno using a layout fully generated by the Quilter compiler. Check out the last post to see that board.
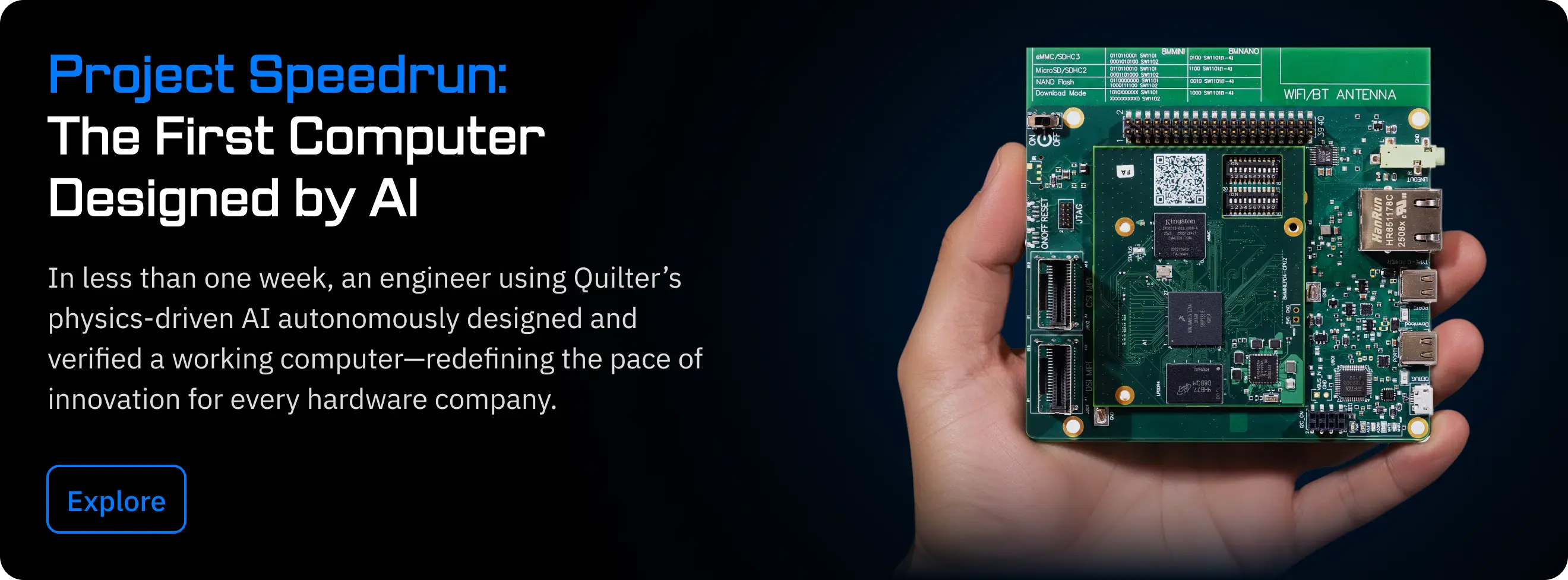
For our second board, we decided to step it up a notch! We were super impressed with the capabilities of the OpenMV H7 R2, so we decided to tackle this one as our next test board.

The OpenMV H7 R2 comes with:
- an STM32 running at 480 MHz
- a camera (640x480 8-bit images at 40 FPS)
- a USB interface (12 Mbs)
- a micro-SD Card (100 Mbs)
- a SPI bus (80 Mbs), supporting an LCD shield
All of this makes for an impressive self-contained computer vision kit! The STM32 provides enough processing power to capture images from the camera, run computer vision algorithms (even including some neural networks), and display rendered output on a screen!
What better use of this power than to give everyone a mustache?
Inputs
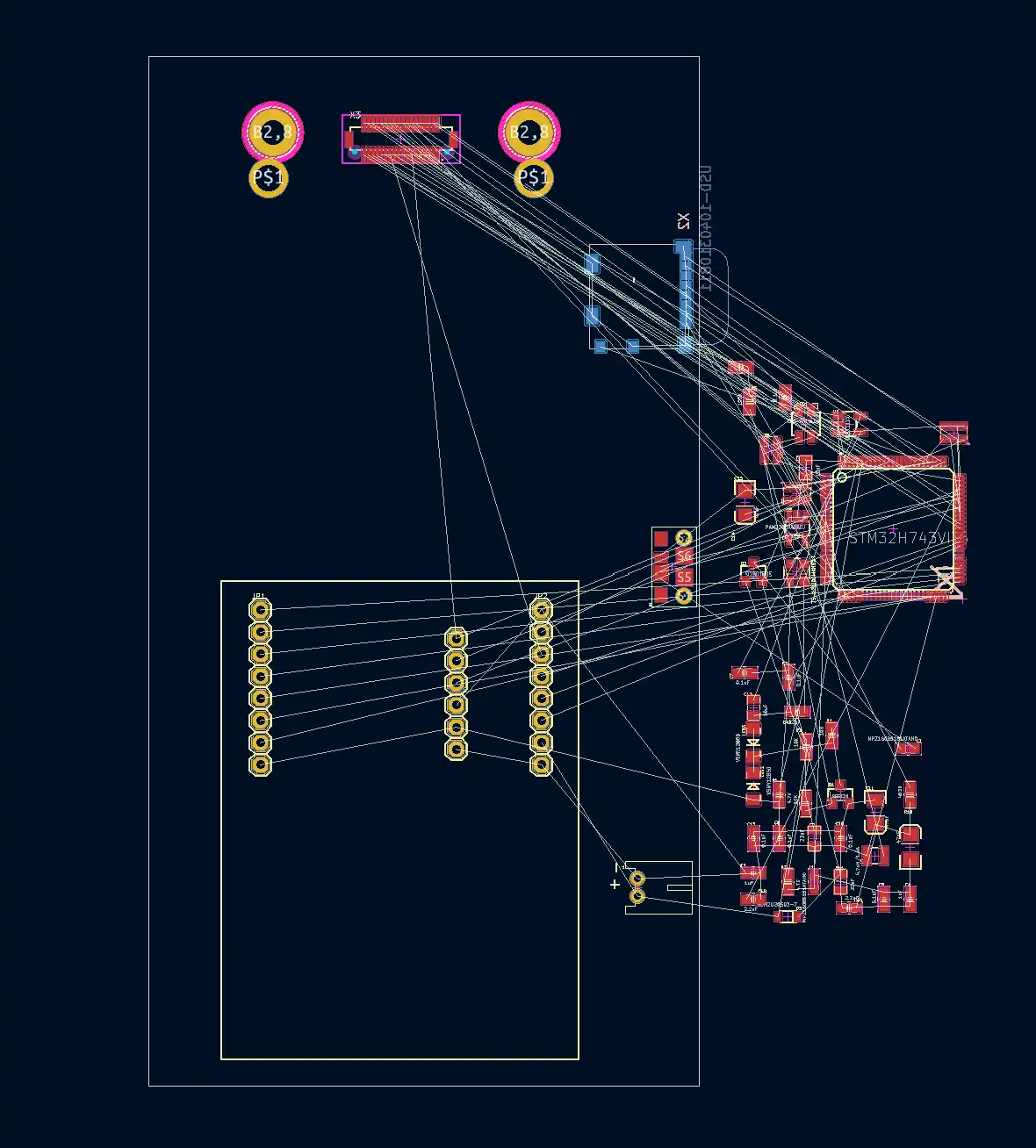
The CAD files for the original OpenMV H7 R2 can be found on their website. These were created in Eagle, but as we had just added support for KiCAD, we decided to import these files into KiCAD for this run. Our input file includes just a KiCAD board file with a board outline and placements for the connectors. You can download it here.
Make It!
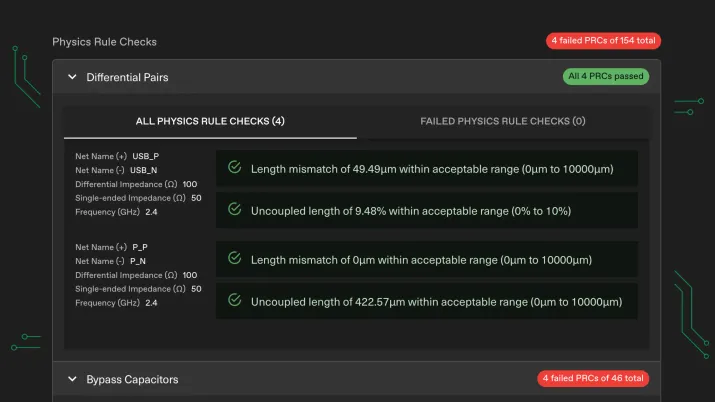
Quilter can compile this design in under an hour to produce a DRC-error-free design that can be submitted straight to the manufacturer. We sent this board off to JLCPCB, and got busy soldering as soon as we got the bare PCBs!

The design files for this board as built are here.
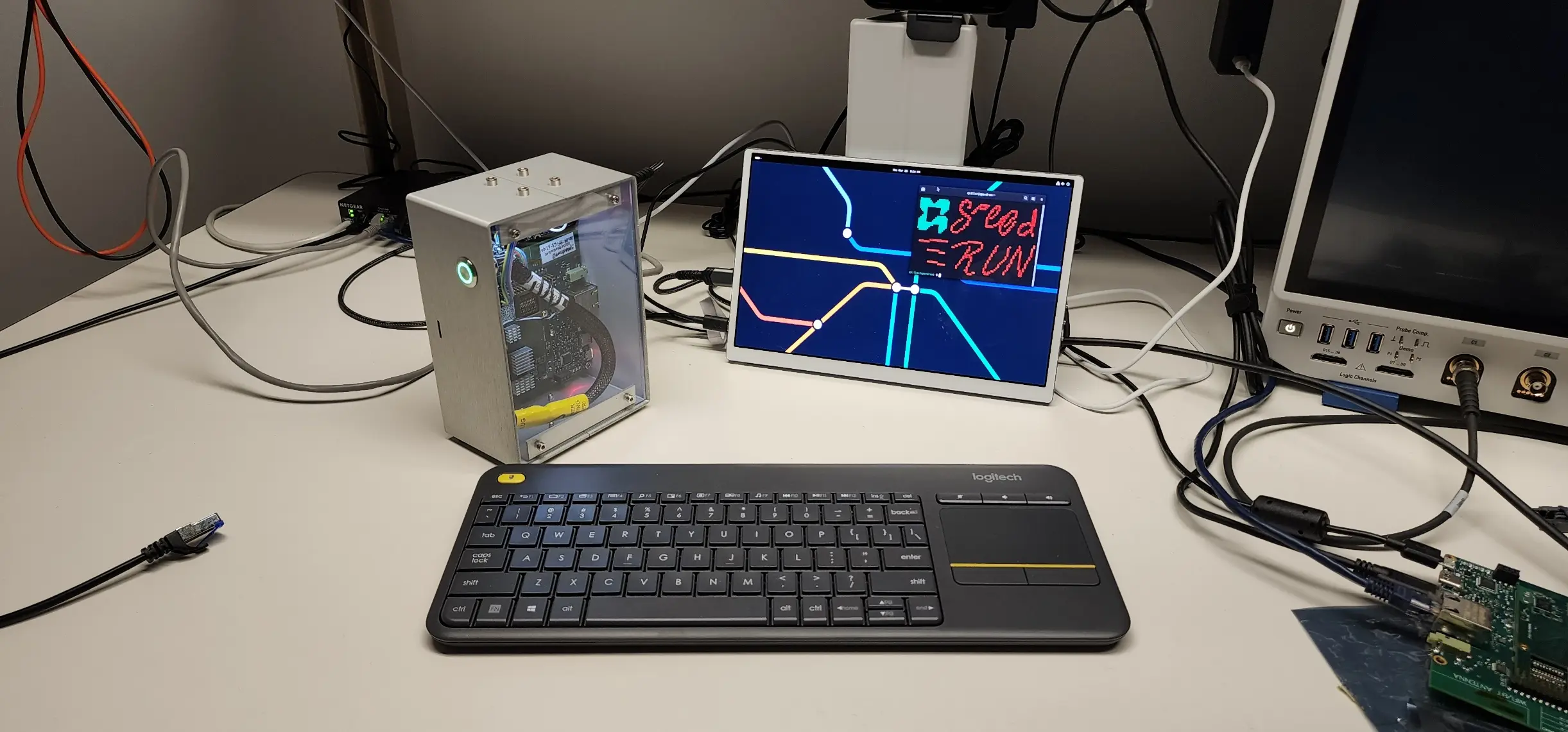
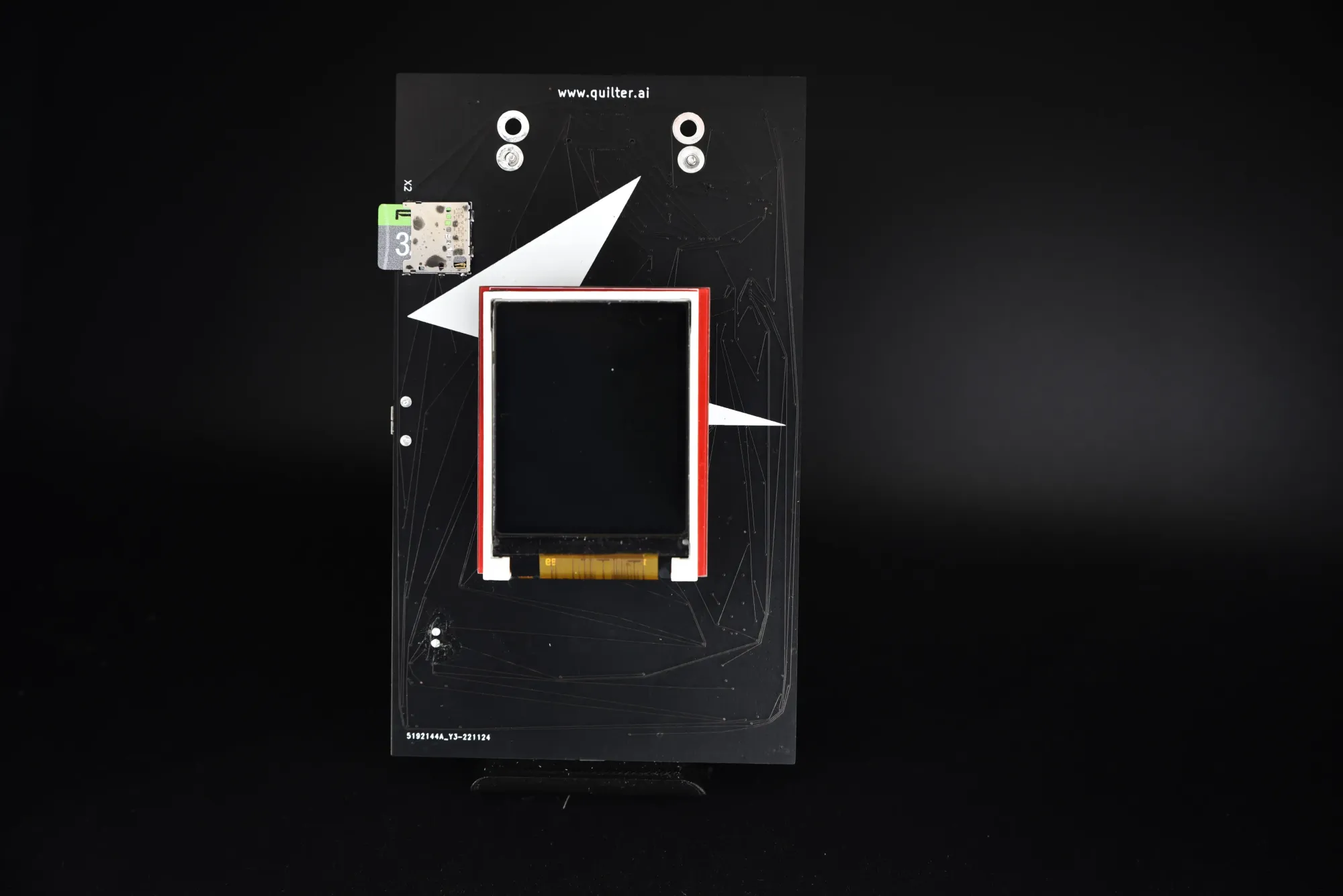
Test It!
We decided to see if we could get our OpenMV to perform on-board face tracking and rendering using the camera and screen. This requires USB connection, reading an image from the SD card, continuously reading frames from the camera, face detection on the microprocessor, and continuously writing to the LCD screen. A great exercise for all of the peripherals on this board. You can find our source code for this project here.
For our guinea pig, we pulled up Everyday Astronaut’s video on the Raptor engine. A great watch!
.gif)